MobEyes Simulation Results
|
|
We evaluated MobEyes protocols via extensive ns-2 simulations.
This page shows the most important results, with the
goal of investigating MobEyes performance from the following perspectives:
- MobEyes Harvesting Delay for 1 Agent and 1 Hop diffusion: we simulate MobEyes protocols
for summary collection on regular nodes as well as for agent harvesting;
- Effect of k-hop Relay and Multiple Agents
 : we examine how
MobEyes effectiveness can be increased by leveraging k-hop passive diffusion
and the deployment of multiple agents;
: we examine how
MobEyes effectiveness can be increased by leveraging k-hop passive diffusion
and the deployment of multiple agents;
- Summary Diffusion Overhead
: we investigate the
trade-off between the delay in the harvesting process and the load imposed on the
communication channel;
- Stability Check: we verify that the system is stable, even in the worst case of a single
harvesting agent and of highest summary generation rate expected for MobEyes scenarios;
- Tracking Application: we prove MobEyes effectiveness in supporting
a tracking application, where trajectories of regular nodes are locally reconstructed by a police agent
based on harvested summaries;
- Border Effect and Turn Over: we tested MobEyes
with a novel mobility model, which takes node turn over effects into account.
Simulation Settings
We consider vehicles moving in a fixed region of size 2400m x
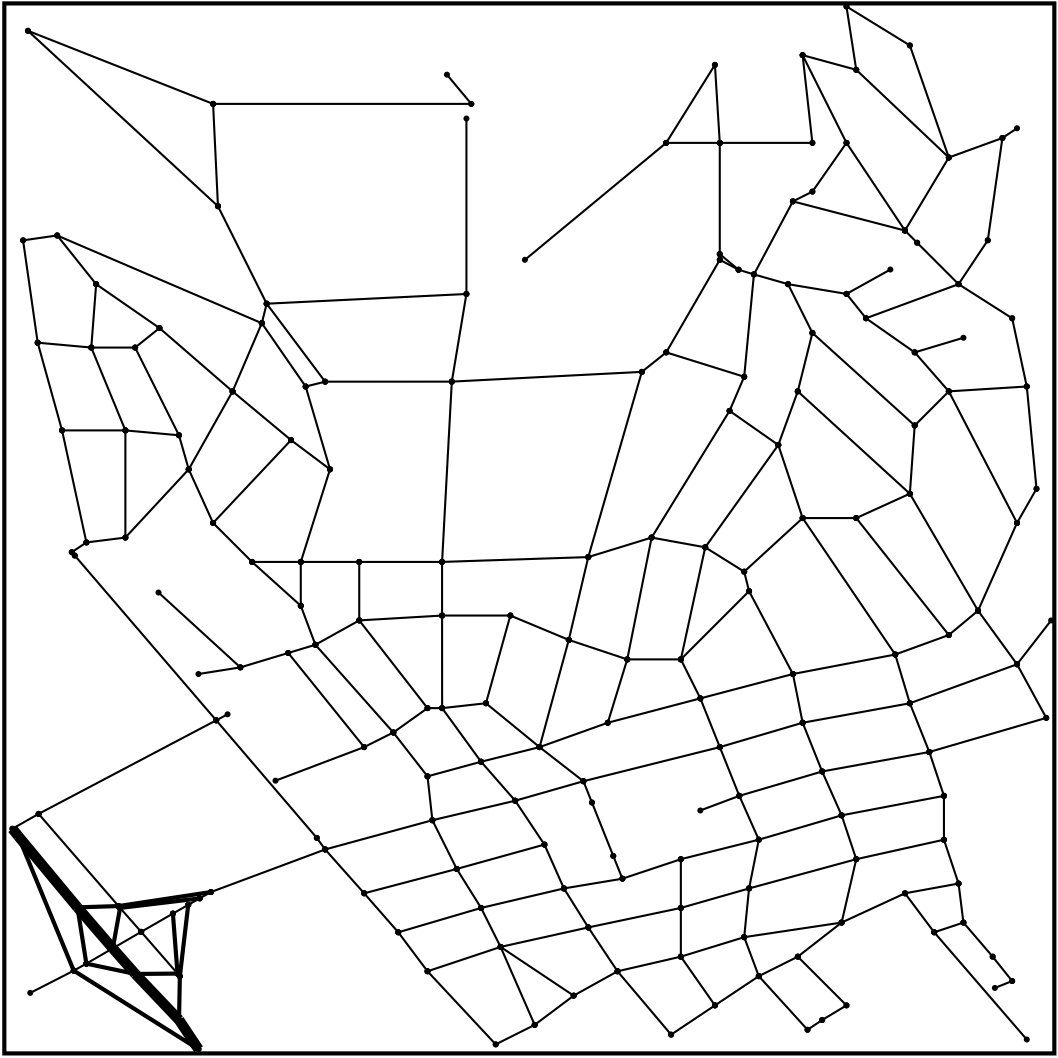
2400m. The default mobility model is Real-Track
(RT). RT
permits to model realistic vehicle motion in urban environments. In
RT nodes move following virtual tracks, representing real accessible
streets on an arbitrary loaded roadmap. For this set of experiments,
we used a map of the Westwood area in the vicinity of the UCLA
campus, as obtained by the US Census Bureau data for street-level
maps.
At any
intersection, each node randomly selects the next track it will run
through; speed is periodically allowed to change (increase or
decrease) of a quantity uniformly distributed in the interval
[0, Δs]. To evaluate the impact of the mobility model on
MobEyes performance, we tested two additional well-known models,
namely Manhattan (MAN) and
Random WayPoint (RWP). Similarly to
RT, MAN builds node trajectories following urban roads; however, in
MAN roads are deployed according to a regular grid, thus allowing a
more uniform node deployment. In our simulation, we adopted a
10 x 10 grid. RWP instead does not constrain node positions to
follow actual road tracks, but moves nodes toward randomly selected
destinations with random speeds. When a node reaches its
destination, it remains still for a fixed period (which we set equal
to 0 by homogeneity with the other models), and then selects a new
destination. Surprisingly, RWP is considered "a good approximation
for simulating the motion of vehicles on a road", generally
producing limited distortion on protocol performance. Let us remark
that MobEyes agents do not exploit any special trajectory or
controlled mobility pattern, but move conforming with regular nodes.
Our simulations consider number of nodes N=100,200,300. Vehicles
move with average speed v=5,15,25; to obtain these values, we
carefully tuned maximum and minimum speeds depending
on the mobility model. The summary advertisement period of regular
nodes and the harvesting request period are kept
constant and equal to 3s through all the simulations. We note that
if the value of this parameter is too large, MobEyes effectiveness
is reduced since it is possible that two nodes do not exchange
messages, even if they occasionally enter in each other transmission
range; this effect is magnified, as node speed v increases. The
chosen value has been experimentally determined to balance the
effectiveness of our protocol and the message overhead, even in the
worst case, i.e., v=25. A deeper and more formal investigation of
the optimal value of the advertisement period is object of future
work.
Finally, we modeled communications as follows: MAC protocol
IEEE 802.11, transmission band 2.4 GHz, bandwidth 11Mbps, nominal
radio range equal to 250m, and Two-ray Ground propagation model.
Where not differently stated,
reported results are average values out of 35 repetitions.